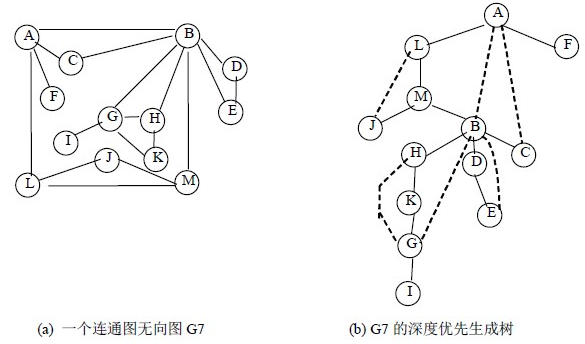
割点,桥(割边)
割点:存在原本连通的无向图中,删去后会导致该无向图不连通的点。
割边:同上的边。
纠正:
割点:去掉后使图的连通分支数增加的点.(注意是去掉整个点,而不是点周围的边)
割边:图G的边e是割边当且仅当e不在任何一个圈上
$Tarjan$算法,$dfs$原图,生成搜索树,原图可表示为搜索树和一些边集,我们需要知道当前点通过非搜索树边能到达的$id$最小的点$low(u)$,此时需要维护 $u$ 掌管的子树能到达的最先遍历到的点.
考虑两种情况:
- 1)u为根节点,则此时u为割点当且仅当u有两棵及以上搜索子树
- 2)u不是根节点,则此时一旦u存在任何一个儿子v使得$low(v)>=id[u]$,则u为割点
|
|
强连通
强连通分量:在有向图中一个子图,其内部任意两点均可相互到达,并使该子图最大
(这里撇去以前的$kosaraju$写法)
$Tarjan$ :按照 $dfs$ 搜索树,如果当前节点的子树中没有任何边指向子树外的内容,则我们能确保当前的子树内的强连通情况与子树外完全没有关系,(根本不能相互到达),那么我们还剩余在栈中的所有元素就是u所在的强连通分量的所有元素。换句话说,当前栈里剩余的元素的$low(v)$一定在$v$的前面,我们只需要递归回到那个节点的时候把所有的元素收集起来就好. $O(n+m)$
注意点:
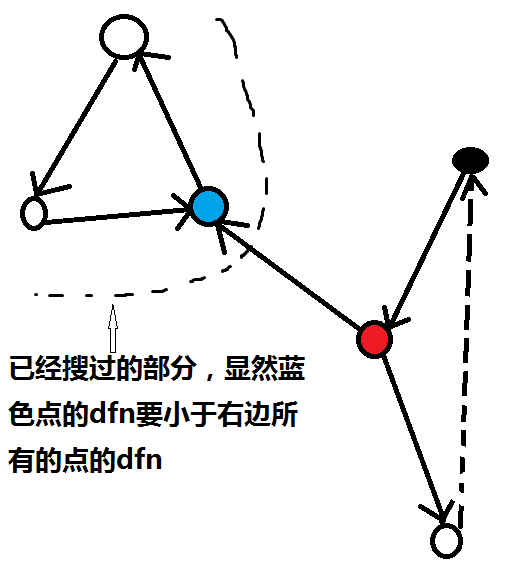
由于是有向图,因此当前搜索到的子图有可能有边指向以前的已经搜过的点,例如下图中我们在红色点考虑蓝色点,蓝色点的$dfn$ 必然会导致红色点的$low$比右边任何点的$dfn$都小,这将导致右边的强连通分量无法被求出来.
因此,要确保当前的搜索过程一定在还未确定强连通分量的子图中进行,需要区分已经处理的点和还未处理的点,我们只需要考虑栈中的元素即可,(因为假如有别的子图还未被遍历过,这里的点一定不可能在当前的子图的强连通分量中,不需要考虑)
|
|
Ps : Lowest Common Ancester
运用RMQ求解的Lca,注意:预处理复杂度$O(nlogn)$,求解复杂度$O(1)$
引入:欧拉序列
与$dfs$序不同的是,$dfs$序表示的是每个点被加入栈的顺序),但是欧拉序列表示的是栈顶中的元素的序列,$dfs$序中一个$[st[u],ed[u]]$只能表示其子树内的元素并且长度恰等于子树内的元素的个数,然而欧拉序列中$[st[u],ed[u]]$不仅仅是表示子树内的元素,即,($st[u]$表示$u$初次出现的位置,$ed[u]$表示$u$最后一次出现的位置),我们能确保$[st[u],ed[u]]$中的元素只可能是$u$的子孙和$u$本身,但是同时还有一个$dfs$遍历的顺序.
$Function\;Dfs(u,\&tot)\{$
$euler.add(u)$
$st[u]=++tot$
$for\;v\;in\;\{son[u]\}\;do$
$Dfs(v,tot)$
$euler.add(u)$
$done$
$\}$
通过这段伪代码可以知道,欧拉序列实际上就是每条边遍历的顺序及方向,(任意相邻位置上的两点均为某边的两端).
这样一来,$lca(u,v)$就是在$[ed[u],st[v]]$中$dep$值最小的点,那么我们只需要维护一个区间最小值即可,可以用$ST$表解决,然后查询的时候,非常漂亮的一步就是我们不再使用倍增的写法$O(logn)$,直接$O(1)$判断,由于是区间最小值,对于区间$[L,R]$,只需要求出$[L,x]$和$[y,R]$$(x>=y)$的最小值即可,那么我们只需要求出最小的长度使得其两倍能覆盖$[L,R]$即可,i.e:$2^{len}*2>=R-L+1$,这里的$len$可以预处理出来:
|
|
$ST$表的预处理部分:
|
|
查询的时候还有一个小技巧,由于$[st[u],ed[u]]$中只有$u$的子树和$u$本身,那么其中$dep$最小的一定是$u$,那么其实只要查询$[st[u],st[v]]$中的最小深度元素,对答案不构成影响。
虚树
在处理一些问题的时候,有时候往往要将一部分满足条件的点提出来单独处理,但是这个时候如果仍旧$O(n)$扫描是不明智的,考虑能否造出一颗虚树
主要解决树上每次询问k个关键点,满足∑k是线性的问题
Defination
所谓虚树,即将所需的点都提取出来,并用”虚边”将其连接起来,同时保留了所有点的相对位置(如LCA,虚边的长度),即其中对答案有影响的信息.
Construction
将所有的点按照$Dfs$序排序,然后将任意相邻两点的$Lca$加到集合中,整合一下即可得到一颗虚树所需的点集.
- i.e:将所有点按照$dfn$排序后,{相邻两点Lca}={任意两点Lca}
- Proof: